เราจะมาลองเล่น Deep Learning โดยนำมาประยุกต์ใช้กับ Self-Driving Car ในรูปแบบของ Simulator แบบง่าย ๆ กัน เพื่อเรียนรู้พฤติกรรมของมนุษย์ จากการ Training Images ที่บันทึกการขับขี่ของเรา Steering โดยใช้ Model ของ Neural Network ในการทดสอบ แบ่งออกเป็น 2 Track คือ Training และ Validation
Requirement
Install
- ทำการดาวน์โหลด Self-Driving Car Engineer Nanodegree จาก GitHub
# (base) c:\> git clone https://github.com/naokishibuya/car-behavioral-cloning.git
# (base) c:\> cd car-behavioral-cloning- ทำการ Import Environment เพื่อทำการรัน Tensorflow โดยเลือกรันด้วย CPU หรือ GPU
# (base) c:\car-behavioral-cloning> conda env create -f environment.yml
# (base) c:\car-behavioral-cloning> conda env create -f environment-gpu.yml- ทำการ Activate Environment เพื่อใช้งาน
# (base) c:\car-behavioral-cloning> conda activate car-behavioral-cloning
# (base) c:\car-behavioral-cloning> conda deactivate- เปิดโปรแกรม Self Driving Car Engineer ที่เขียนด้วย Unity ของ Udacity โดยเลือกเป็น Autonomous Mode
- ทำการรันแบบ Pretrain Model
# (car-behavioral-cloning) c:\car-behavioral-cloning> python drive.py model.h5- รอสักแปปมันจะทำการขับรถเองโดยอัตโนมัติ ซึ่งมันขับออกนอกไหล่ทางครับ ฮ่าๆๆ ซึ่งเราจะมาทำการ Train Model ใหม่

- กลับไปยังหน้าเมนู แล้วเลือก Traning Mode แล้วทำการขับจนกว่าจะพอใจ แล้วทำการบันทึกไว้ในโฟลเดอร์ใหม่ที่ชื่อว่า data/

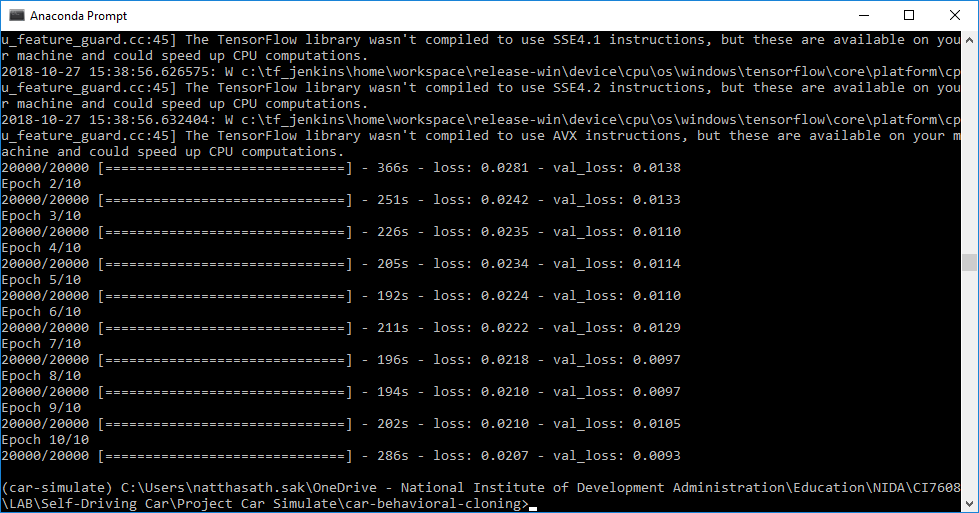
- ทำการ Train Model
# (car-behavioral-cloning) c:\car-behavioral-cloning> python model.py- รอจน Train Model เสร็จซึ่งจะค่อนข้างจะใช้เวลานาน
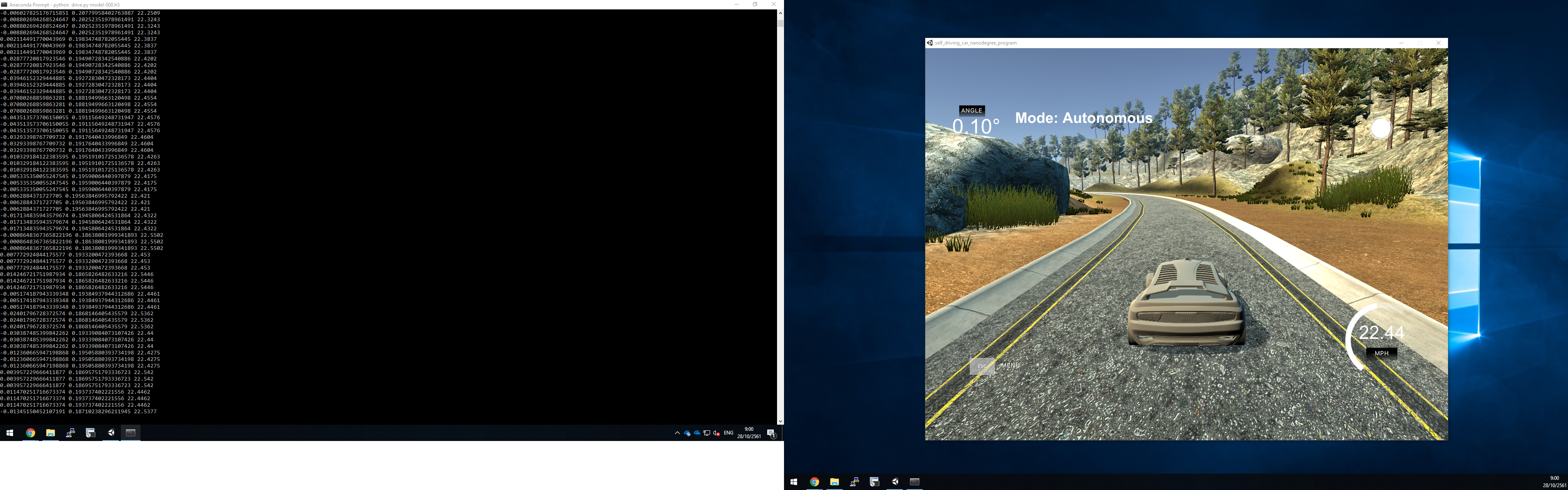
- กลับมาเลือกเป็น Autonomous Mode แล้วทำการเลือกใช้ Model ที่เราต้องการ
# (car-behavioral-cloning) c:\car-behavioral-cloning> python drive.py model-000.h5- รอสักแปปมันจะทำการขับรถเองโดยอัตโนมัติ ซึ่งมันจะขับดีขึ้นกว่าเดิม มั้ง!! อย่างน้อยมันก็ยังอยู่บนถนนละว่ะ
อ่านเพิ่มเติม : https://bit.ly/2PZEpXf
Leave a Reply